常见移动机器人运动学模型总结,关注“混沌无形”公号,获取免费资源
”运动学模型 移动机器人“ 的搜索结果

本文构建四轮驱动移动机器人(4WD)的数学运动模型,可在“混沌无形”免费下载本文PDF
车式移动机器人运动学模型 问题 车式移动机器人更具有普遍意义。 参数 vvv:机器人自身线速度 ω\omegaω:前轮转向角速度 u\textbf{u}u:输入,包括vvv,ω\omegaω q˙\dot{\textbf{q}}q˙:机器人在环境中的...
差速传动移动机器人运动学模型 问题 如何根据差速传动机器人左右两边轮子的速度,计算出机器人当前的状态。或者想要以一定速度到达某处,需要给出差速两边轮子的速度指令。 当然大多数时候,购买的机器人底盘能够...

移动机器人——运动模型
标签: robot
四轮全方位轮式移动机器人的运动学模型研究pdf,四轮全方位轮式移动机器人的运动学模型研究
移动机器⼈差速轮运动学模型 原⽂地址: 做底层程序的时候,经常⽤到航迹推演(Odometry),⽆论是定位导航还是普通的⽅向控制。航迹推演中除了对机器⼈位姿进⾏估计,另 ⼀个很重要的关系是移动机器⼈前进速度、...
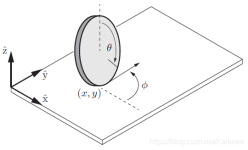
对于给定的机器人状态x: 以米为单位的全局车辆 x 位置y: 全局车辆的 y 位置,以米为单位θ: 全局车辆航向,单位为弧度ψ: 车辆转向角,单位为弧度v: 车辆速度,单位为米/秒ω: 车辆角速度,单位为弧度/秒运动学方程...
基于阿克曼原理的轮式移动机器人运动学模型对于无人驾驶车辆的研究有着重要的意义。对轮式移动机器 人的运动学特性进行了分析,建立了不考虑滑行、刹车等的轮式移动机器人的运动学模型。对该运动学模型引入了 阿克曼...

本文分析麦克纳姆轮全向移动机器人运动模型及应用,在“混沌无形”免费下载本文PDF

在机器人的运动中,经常会涉及到航向推演。...在学习机器人运动模型推导的时候,有看到 网上别人的推导过程,链接如下: https://blog.csdn.net/qq_16149777/article/details/73224070 http://...
履带式机器人运动学分析.pdf

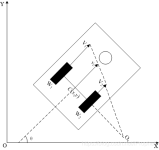
在机器人无侧向移动的条件下,以左右轮的驱动力为输入量,建立两轮足球机器人平动和转动的离散时间 状态空间模型;将免疫算法与预测控制结合,提出了一种免疫预测控制方法,在所建立的状态空间模型的基础上,对机器人进行...
为建立SCARA机器人的运动学模型,以KR 6 R500 Z200型号的KUKA SCARA机器人为研究对象,通过 D-H 建模方法,通过矩阵变换计算得到 SCARA 的末端位姿矩阵,获得 SCARA 的运动学正解;在此基础上,采用代数法得到SCARA ...

... 做机器人底层程序的时候,经常用到...航迹推演中除了对机器人位姿进行估计,另一个很重要的关系是移动机器人前进速度、转向角速度与左轮速度、右轮速度之间的转换。 在机器人局部路径规划算法DWA解析一...

摘要通过对足球机器人运动学模型的分析,考虑到系统的时变、非线性和干扰大等特点,以全向移动机器人为研究平台,提出一种将模糊控制与传统的PID 控制相结合的方法,应用到足球机器人的运动控制系统中。针对足球...
移动机器人运动学模型是描述机器人在空间中运动的数学模型。它主要包括轮式机器人和全向轮机器人两种类型。 1. 轮式机器人运动学模型: 轮式机器人通常使用两个或多个轮子进行运动。其运动学模型可以通过麦克纳姆...
轮式移动机器人动力学是从有关该主题的标准论文中研究的,并进行非线性反馈线性化以将运动方程简化为轮式机器人位置误差的二阶动力学方程。 AVI 文件录制也可用于以后轻松查看。 只需取消注释 PLOTBOT_WMR 文件中标...

#阿克曼车辆运动学模型 #参考文献: 阿克曼车辆运动学模型 阿克曼车辆运动学模型
一、轮式移动机器人运动学 机器人的平面姿态
http://www.diegorobot.com/wp/?p=740&lang=zh https://blog.csdn.net/qq_16149777/article/details/73224070 https://blog.csdn.net/qq_35508344/article/details/83006923 ...
推荐文章
- YOLO V8车辆行人识别_yolov8 无法识别路边行人-程序员宅基地
- jpa mysql分页_Spring Boot之JPA分页-程序员宅基地
- win10打印图片中间空白以及选择打印机预览重启_win10更新后打印图片中间空白-程序员宅基地
- 【加密】SHA256加盐加密_sha256随机盐加密-程序员宅基地
- cordys 启动流程_cordys服务重启-程序员宅基地
- net中 DLL、GAC-程序员宅基地
- (一看就会)Visual Studio设置字体大小_visual studio怎么调整字体大小-程序员宅基地
- Linux中如何读写硬盘(或Virtual Disk)上指定物理扇区_dd写入确定扇区-程序员宅基地
- python【力扣LeetCode算法题库】面试题 17.16- 按摩师(DP)_一个有名的讲师,预约一小时为单位,每次预约服务之间要有休息时间,给定一个预约请-程序员宅基地
- 进制的转换技巧_10111100b转换为十进制-程序员宅基地